What is Android?
Android is the world's most popular operating system for mobile devices and tablets. It is an open source operating
system, created by Google, and available to all kinds of developers with various expertise levels, ranging from rookie to
professional.
(The term 'open source' sounds pretty familiar, doesn't it? Well, open-source means software with source available for
modification and bound to an open source license agreement. More about open source terminology can be found
here).
From a developer's perspective, Android is a Linux-based operating system for smartphones and tablets. It includes a
touch screen user interface, widgets, camera, network data monitoring and all the other features that enable a cell phone
to be called a smartphone. Android is a platform that supports various applications, available through the Android Play
Store. The Android platform also allows end users to develop, install and use their own applications on top of the Android
framework. The Android framework is licensed under the Apache License, with Android application developers holding the
right to distribute their applications under their customized license.
Like most software, Android is released in versions. Google has also assigned names to its versions since April 2009.
Below are all the versions of Android released to date:
|
|---|
| Version No. | Name | For: |
| 1.0 | Android Beta | Phone |
| 1.1 | Android | Phone |
| 1.5 | Cupcake | Phone |
| 1.6 | Donut | Phone |
| 2.0/2.1 | Eclair | Phone |
| 2.2.x | Froyo | Phone |
| 2.3.x | Gingerbread | Phone |
| 3.x | Honeycomb | Tablet |
| 4.0.x | Ice Cream Sandwich | Phone and Tablet |
| 4.1/4.2 | Jelly Bean | Phone and Tablet |
As we can see in the table above, various versions of Android are supported on phones and tablets. There are umpteen
Android devices available in the market from manufacturers like Samsung, HTC, Motorola and others. Google itself also has
phones made in conjunction with OEMs, branded as the Nexus series.
Understanding Android
To begin development on Android even at the application level, I think it is paramount to understand the basic internal
architecture. Knowing how things are arranged inside helps us understand the application framework better, so we can can
design the application in a better way.
Android is an OS based on Linux. Hence, deep inside, Android is pretty similar to Linux. To begin our dive into the
Android internals, let us look at an architectural diagram.

The above diagram illustrates the Android architecture. As you can see, it is a software stack above the hardware that
is provided by the OEMs. Let's start with the topmost layer, i.e., the applications.
Applications
The diagram shows four basic apps (App 1, App 2, App 3 and App 4), just to give the idea that there can be multiple apps
sitting on top of Android. These apps are like any user interface you use on Android; for example, when you use a music
player, the GUI on which there are buttons to play, pause, seek, etc is an application. Similarly, is an app for making
calls, a camera app, and so on. All these apps are not necessarily from Google. Anyone can develop an app and make it
available to everyone through Google Play Store. These apps are developed in Java, and are installed directly, without the
need to integrate with Android OS.
Application Framework
Scratching further below the applications, we reach the application framework, which application developers can leverage
in developing Android applications. The framework offers a huge set of APIs used by developers for various standard
purposes, so that they don't have to code every basic task.The framework consists of certain entities; major ones are:
- Activity Manager
This manages the activities that govern the application life cycle and has several states. An application may have
multiple activities, which have their own life cycles. However, there is one main activity that starts when the application
is launched. Generally, each activity in an application is given a window that has its own layout and user interface. An
activity is stopped when another starts, and gets back to the window that initiated it through an activity callback.
- Notification Manager
This manager enables the applications to create customized alerts
- Views
Views are used to create layouts, including components such as grids, lists, buttons, etc.
- Resource Managers
Applications do require external resources, such as graphics, external strings, etc. All these resources are
managed by the resource manager, which makes them available in a standardized way.
- Content Provider
Applications also share data. From time to time, one application may need some data from another application.
For example, an international calling application will need to access the user's address book. This access to another
application's data is enabled by the content providers.
Libraries
This layer holds the Android native libraries. These libraries are written in C/C++ and offer capabilities similar to
the above layer, while sitting on top of the kernel. A few of the major native libraries include
- Surface Manager: Manages the display and compositing window-ing manager.
- Media framework: Supports various audio and video formats and codecs including their playback and recording.
- System C Libraries: Standard C library like libc targeted for ARM or embedded devices.
- OpenGL ES Libraries : These are the graphics libraries for rendering 2D and 3D graphics.
- SQLite : A database engine for Android.
Android Runtime
The Android runtime consists of the Dalvik Virtual Machine. It is basically a virtual machine for embedded devices,
which like any other virtual machine is a bytecode interpreter. When we say it is for embedded devices, it means it is low
on memory, comparatively slower and runs on battery power. Besides the Dalvik Virtual Machine, it also consists of the core
libraries, which are Java libraries and are available for all devices.
Kernel
The Android OS is derived from Linux Kernel 2.6 and is actually created from Linux source, compiled for mobile devices.
The memory management, process management etc. are mostly similar.
The kernel acts as a Hardware Abstraction Layer between hardware and the Android software stack.
Android SDK
As already mentioned, Android is open source and hence the source code is available for all developers. In totality it
is called the Android SDK. You can download, build and work on Android in a number of different ways--it all depends on
what you want to do. If your goal is to develop an Android application, you don't necessarily need to download all the
source. Google recommends the Eclipse IDE, for which there is an available Android Developer Tools (ADT) plugin, through
which you can install the specific SDK, create projects, launch emulators, debug, etc. You can see more details of Eclipse
and ADT through Android's official website for developers - http://developer.android.com/sdk/index.html
Android Development for Windows Users
Android as of now does not support building on Windows, so if you want to modify the Android OS itself, you'll have to
use Linux (see
building the Android OS). However, on Windows, we do have tools and plugins for application
and native Android development. And here we will talk about setting up basic Android development tools on Windows.
Downloading the Android SDK and developer tools
Google provides a convenient bundle to download and setup Android for Windows developers,
which you can download here, under the name ADT bundle for Windows.
The exact name of the file you download will depend on your OS architecture (32 vs 64 bit), but for my case (64 Bit Win 7),
I see the following zip file downloaded:
adt-bundle-windows-x86_64.zip.
Extracting the zip file, I have contents as in the following snapshot:
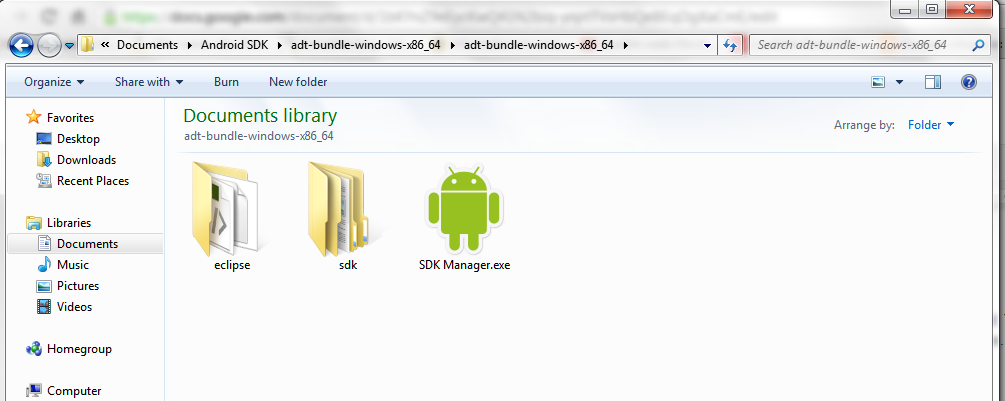
First of all, we have Eclipse, which is the IDE for writing source. As an IDE it provides the environment for developing
Android Applications. Android Applications are developed primarily in Java. Next we have the 'sdk', which does not include
any of the source. However, it holds the already built platform tools, tools, images and some platform specific libraries.
When we say, building Android is not supported on Windows,we mean that we can't compile system images and tools. However,
other sources needed for application development are be available through the SDK Manager, which is the third entity
present in the extracted zip file.
So, let's download the sources! Double click the SDKManager.exe. You'll see something like this:

This is the SDK Manager, via which we can install or delete whatever version of SDK we want. As you can see, it mentions we
have the Android SDK Tools and Android SDK Platform Tools installed.
The latest Android available, as of the writing of this article, is 4.2, but with the SDK we can download and install
any of the previous versions too. Now let us play around with the latest Android--i.e.,4.2, which is also known as Jelly
Bean.
Select the check box for "Android 4.2(API 17)", which will select everything required for and under Android 4.2.

In all, as we can see, SDK Manager found 6 packages that need
installation. Click the "Install 6 packages" button. We see another
dialog box for package descriptions and license.
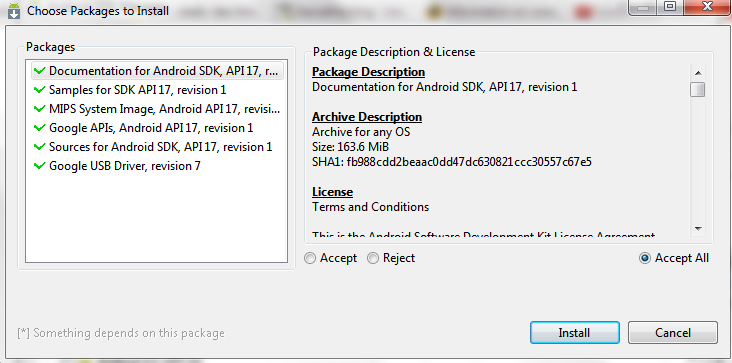
Select "Accept All" and click Install, which will initiate the download and then installation.
When done, you will see "Installed" in front of all the packages selected.
It's now time to launch Eclipse, but first, we need to make sure that we have the Java Developer Kit (JDK) installed. If
you don't have it, you can
download it from
Oracle here.
I have JDK 7 installed in my case. Next, we need to launch Eclipse from the executable present in the Eclipse directory .
If we obtained Eclipse via the instructions in this article, it should already have the ADT plugin installed. (Otherwise,
you can
download the ADT separately by following
the instructions here.) Eclipse generally asks for a workspace path where it will create and maintain projects.
Here is what the newly launched Eclipse looks like:
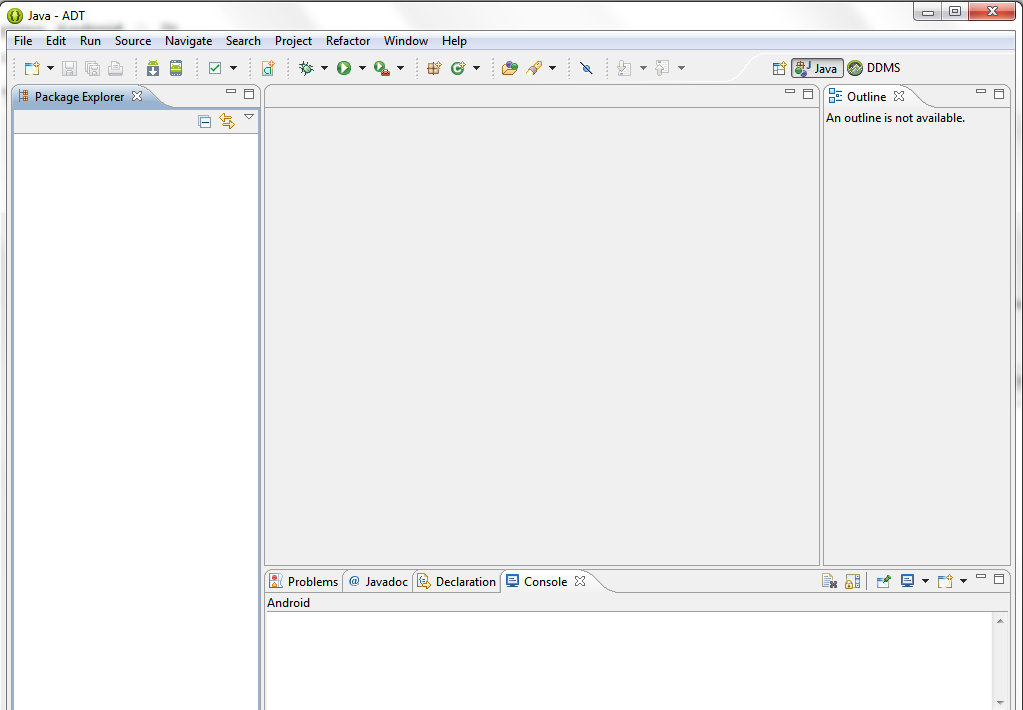
Eclipse also includes the SDK Manager from where you can manage the SDK packages. Check out the Window menu and select
"Android SDK Manager".
To see what the emulator looks like, go to the Window menu and select "Android Virtual Device Manager".
From there, we can create our virtual device or use one of the standard devices available.
To create a new virtual device, click on 'New' as we see in the following snapshot:

Another window will pop up to take inputs for device type, target processor, memory, etc.

You can provide customized device specifications for a virtual device. Once the device is created by clicking 'OK', it will
be available in the list on "Android Virtual Device Manager" window. To launch the emulator for your own defined virtual
device, select it and click "Start".
You can also select pre-loaded options that correspond to the specifications of existing Android devices. To see them in
the Android Virtual Device Manager, go to the Device Definitions tab.

We select the first in our list, "Nexus S by Google", and add a virtual device by clicking "Create AVD".
The following dialog box requires the "Target" and "CPU" to be specified along with the size of the SD Card.

We will assign
Target as "Android 4.2 - API level 17"
CPU as "ARM"
and SD Card Size equals "1024 MiB"
and click "OK".
We can now see the newly defined virtual device in the AVD list

To launch the emulator, select it and click "Start". Here's what the emulator looks like:
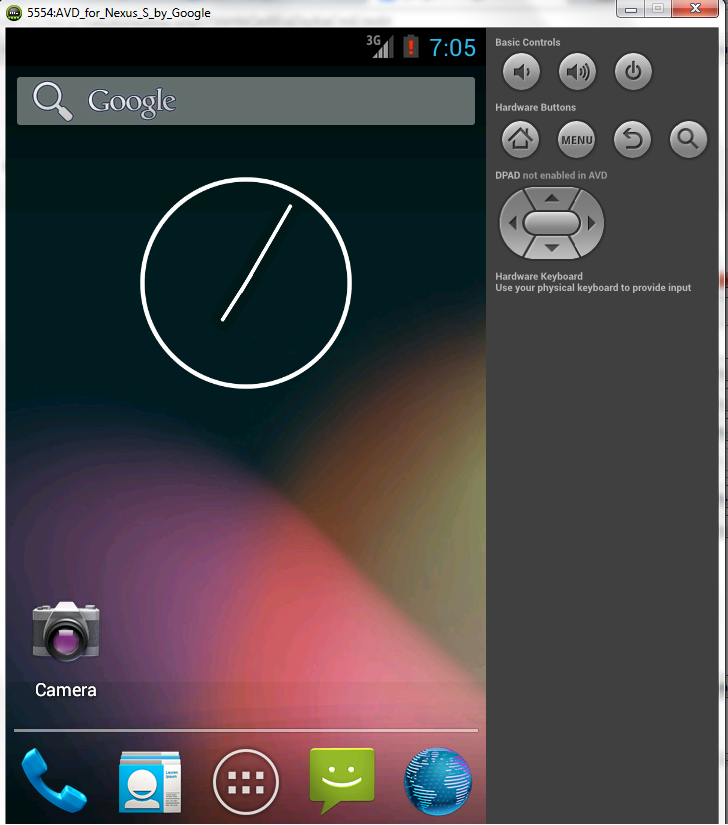
We can now use our newly-created emulator for running our Windows Android apps. All we have to do is compile our code, then
load the app onto the emulator.
The above instructions, for Windows users, will work great if all you want to do is create Android apps. However, you
can do even more with Android, including modifying the Android OS to create Android ROMs or MODs--that's the beauty of open
source! To do this, you'll need to download the complete available Android source from its repository and cross-compiling
for the device. You'll also need to be using Linux, since building Android is not supposed on Windows machines. And
before we move further, there are certain assumptions to get out of the way:
1. All the information is generic and should work for all Linux flavours, however these instructions have only been
tried and tested on Ubuntu 11.04.
2. Because we had to pick one of the versions of Android, we chose Android 4.0.1. Hence, some commands might be specific
to Android 4.0.1, but things might be slightly different for other versions.
Memory Requirements
It is always a wise idea to check the memory requirements before starting any project. The size of the Android SDK is
around 8.5GB and you will need around 30GB free disk space to build it.
Prerequisite Installations
Prior to downloading the SDK and starting cross-compiling, there are certain prerequisites of the Android SDK we have to
have. It is better to set up these before jumping into the Android SDK, as we all know prevention is much better than
debugging! First of all, for the Android version we have chosen (i.e Android 4.0.1) cross compilation is well tested on 64
-bit machines, but the documentation says it is experimental on 32-bit machines.
1. JDK
Android SDK building requires the JDK, so you must install the JDK. For Android versions 2.3.x and later, one needs to
install Java 6.
It is recommend to install Sun JDK only, rather than Open JDK..
First, download the JDK
6. Then run the following commands.
(Please Note: To avoid specifying a specific version, the installer binary name and directories are modified to be generic
names.)
$ chmod +x jdk-6xxxx-linux-xxx.bin
$ sudo ./jdk-6xxxx-linux-xxx.bin
$ sudo mv jdk1.6.xxxx /usr/lib/jvm/
$sudo update-alternatives --install /usr/bin/java java /usr/lib/jvm/jdk1.6.xxxx/bin/java 1
$ sudo update-alternatives --install /usr/bin/javac javac /usr/lib/jvm/jdk1.6.xxxx/bin/javac 1
$ sudo update-alternatives --install /usr/bin/javaws javaws /usr/lib/jvm/jdk1.6.xxxx/bin/javaws 1
$ sudo update-alternatives --config java
$ sudo update-alternatives --config javac
$ sudo update-alternatives --config javaws
For versions prior to 2.3.x, Java 5 is required.
2. You also need to install the following packages:
$sudo apt-get install git-core gnupg flex bison gperf libsdl-dev libesd0-dev libwxgtk2.6-dev build-essential zip curl
libncurses5-dev zlib1g-dev ant gcc-multilib g++-multilib
$sudo apt-get install libx11-dev:i386
These packages are needed for downloading and compiling the SDK.
Once these get installed, you are ready to download the Android SDK. There may be some optional things to do, for
example enabling caching, etc. But we will not go into much detail here as we don't really need to do those things.
Downloading the Android SDK
The entire Android SDK is stored in a git repository that also maintains various other versions as well. We need to know
the repository path and then download to a separate directory where we wish to store the complete source.
Let us first create a root source directory.
$mkdir android
Further, we will initialise and configure a tool 'repo', which is used to work with git conveniently.
To download it, we need a 'bin' directory in our home, which should be added to the path.
$mkdir bin
$export PATH=$PATH:~/bin
$curl https://dl-ssl.google.com/dl/googlesource/git-repo/repo > bin/repo
$chmod a+x bin/repo
Now we have the repo installed and must initialise it with the path of git where the Android SDK lies. There is a master
branch of git, which holds the latest Android version. The master branch in git is the main source repository, which means
any new release or new update would be part of this master branch. However, if we want a specific Android version, we need
to initialise with a specific branch.
Here in this article, we will go for a specific branch, since the master will keep on changing.
$repo init -u https://android.googlesource.com/platform/manifest -b android-4.0.1_r1
It will ask you for a name and email id, and you must provide them.
To get all the Android SDK files, you just now need to do:
$repo sync
It may take some time to download the complete source.
In the end, we get
Syncing work tree: 100% (221/221), done.
This indicates the sources are downloaded. Let's have a look at the folder structure from the topmost level; here is
what I have:
$ls
abi build development external libcore packages system
bionic cts device frameworks Makefile prebuilt
bootable dalvik docs hardware ndk sdk
Building Android
Now that we have the source, the next step is to build it. The first thing we need to determine before building is what
platform are we going to run this Android on? It is essential to determine this. The options could be the type of your
device, or an emulator.
When flashing a phone, the worst case it that you may brick the phone in the event of a critical bug. As a result, it is
a good idea to develop on Android through an emulator--so we'll do that.
First of all, we need to set the environment variables, which are specified in a shell script.
$ source build/envsetup.sh
including device/samsung/maguro/vendorsetup.sh
including device/samsung/tuna/vendorsetup.sh
including device/ti/panda/vendorsetup.sh
including sdk/bash_completion/adb.bash
Next, we need to specify the target for which we need to cross-compile, using the command 'lunch'. But first of all, what
is cross-compiling and why we need to do it? Well, cross-compiling is a compiling process that is done for a different
platform, to create an executable or library to be used on a that different platform. Therefore, we would have two
platforms,
- host : On which we have the sources and are being cross-compiled. In our case, this is our Linux machine.
- target: The platform for which the sources are being compiled for, and the compiled image or library will be used on
the target platform. In this case, this would be our Android emulator.
This is required for embedded systems, as not all platforms support compiling and debugging. Examples of such platforms are
ARM, MIPS, etc.
For the target emulator and development build, we do
$lunch full-eng
============================================
PLATFORM_VERSION_CODENAME=REL
PLATFORM_VERSION=4.0.1
TARGET_PRODUCT=full
TARGET_BUILD_VARIANT=eng
TARGET_BUILD_TYPE=release
TARGET_BUILD_APPS=
TARGET_ARCH=arm
TARGET_ARCH_VARIANT=armv7-a
HOST_ARCH=x86
HOST_OS=linux
HOST_BUILD_TYPE=release
BUILD_ID=ITL41D
============================================
Here 'full' is for emulator and 'eng' is because we want a development build.
To see other available options, do:
$lunch
You're building on Linux
Lunch menu... pick a combo:
1. full-eng
2. full_x86-eng
3. vbox_x86-eng
4. full_maguro-userdebug
5. full_tuna-userdebug
6. full_panda-en
Next, we just have to build the code using 'make'. GNU make has the ability to run parallel tasks. How many tasks to run in
parallel is determined by the '-j' option. The usage is
make -jN, where N is the number
For example, to run 4 parallel tasks, our command would be
$make -j4
It is common to set this number between 1 to 2 times the number of hardware threads the computer supports, which is
generally the number of processors. To know how many processors we have in our system, we need to peek into the cpuinfo.
To get the CPU info, we have command
$cat /proc/cpuinfo
However, to get to know the number of processors in a single command, we can use
$grep -c ^processor /proc/cpuinfo
The building of Android also takes quite a lot of time when done for the first time.
Note, all the images, libraries and applications built are placed in the directory
out/target/product/generic/
Running on the Emulator
To launch the emulator with our built Android, just run the following command
$emulator
This will automatically pick the built images and binaries for the recently built Android. You can have the look and
feel of the emulator environment, which is pretty similar to a device.
Conclusion
This article covers the basics to understand Android, and a pragmatic approach to understanding the SDK and get it
working after building it. In future articles, we'll talk more about the details of development in Android for native
libraries and apps including how to write a native Android application.